
21.02.2024 23:30 Gerade eben hab ich den Geistesblitz das alles festzuhalten…
Ich schreib das erstmal für mich nieder, aber eventuell will ja mal wer sehen, wie lange der Weg sein kann, zu einem tollen Astrophoto.
Nachdem mich die ganze Sache etwas (ziemlich) genervt hat, also die Technik, nicht die Fotografie an sich, dacht ich mir ich brauch mal eine ordentliche Pause von dem ganzen Thema.
In vielen Gesprächen mit Freunden sagte ich immer: “Das Feuer kommt schon mal zurück” und naja, EIN (eigentlich gezwungenermaßen fast ZWEI) Jahre später fang ich grade wieder an, mir ein (halb) neues System zusammenzustellen.
Ich hab ja einiges an Teilen Verkauft, vor allem die Skywatcher Montierungen, mit denen ich einfach nicht wirklich warm werde… Die EQM35-pro, die kleine, von der ich sogar zwei hatte, konnte mich mal so gar nicht überzeugen. Und die EQ6-R mochte ich eigentlich, aber die war mit dem 10” Newton halt - am Ende des Tages - doch meist überlastet.
Meinen 10” Newton hätt ich nie verkauft, der ist einfach mein Lieblingsgerät.
Die Kameras wollten bei mir bleiben, keiner wollte sie, was JETZT natürlich von Vorteil ist.
Was ich aber das ganze letzte Jahr gemacht hatte ist nach einer echt großen Sternwartenmontierung Ausschau zu halten. Eine 10Micron GM 2000 HPS, das wärs halt. Neu praktisch unbezahlbar, aber gebraucht?
Egal, sowas verkauft ja keiner, sowas hat man bis zum Ende, sowas ÜBERLEBT einen…
Doch wies der Zufall will, genau diese Montierung entdeckte ich im Jänner gebraucht und unter 10K. Der Verkäufer, ein bekannter Astrofotograf, den Bildern nach in Top Zustand, ich haderte… Bis ich den Verkäufer dann doch anschrieb. Aber Verdammt nochmal und Gott sei Dank, die Montierung war schon verkauft. Das ersparte mir einen Kleinkredit und viele Erklärungen. Etwa zwei Wochen später beim Durchforsten diverser Foren entdeckte ich etwas sehr interessantes. Eine wohl kaum gebrauchte iOptron CEM 120 EC2. Eine richtig große Sternwartenmontierung. 52kg Tragkraft, 26kg Eigengewicht OHNE die Gegengewichte. Und ein wirklich guter Preis.
Der Sache muss ich nachgehen. Die Version EC2 ist auch noch das Topmodell mit 2 hochauflösenden Encodern. Also mal den Verkäufer kontaktieren. So lernte ich Jürgen kennen
Jürgen ist ein Pensionist aus dem Norden Deutschlands und die CEM120 war ihm für seine Warte am Ende doch zu groß. Nach kurzem hin und herschreiben, und der Info dass er das Angebot eh grade wieder rausnehmen wollte, da er dachte er bekommt Sie nicht los, wurden wir recht flott Handelseins.
Und wenige Tage drauf war Sie da.
14.02.2024
Ich besitze jetzt eine iOptron CEM 120 EC2!
Meine Güte was ist das für ein Drum. Ich wusste ja die ist echt groß, aber als ich die ausgepackt hatte, holy moly. Und der Zustand ist wahrlich wie neu.

Nun gut. Und jetzt? Ich hab mir ja vorgenommen nichts mehr zu überstürzen was dieses Thema angeht. Also erstmal Verarbeiten das Ganze. Gut . Der Grundstein ist da, die Basis, das wichtigste Instrument von allen, die Montierung.
Die muss jetzt natürlich irgendwo drauf. Am besten auf eine Säule. In einer Sternwarte. Da kommt jetzt das andere große aktuelle Thema ins Spiel. Der Anbau ans Haus, eine große Garage.
Ich trete das hier jetzt nicht groß breit. Um mehr vom Grundstück zu haben sind ein paar Bauaktivitäten notwendig, und erst wenn diese fertig sind, werd ich sehen ob, wann und wo ich denn meine im Kopf geplante kleine Sternwarte hinstellen werde.
Aber so lange brauch ich ja auch was und wer weiss wie lange das dauert… Also muss ein Stativ her. Mit viel Hilfe aus dem Dark-Matters Discord hab ich mich für ein Geoptik Säulenstativ mit Rollen entschieden. Bestellung ist raus.
17.02.2024
Ich kümmer mich mal ein wenig um das Steuersystem. Hab da ja noch zwei PC-Sticks rumliegen, mit Systemen drauf, das sollte ja kein so großes Problem abgeben. Aber das wird wohl nicht der Fall sein, dacht ich mir, da hakt es sicher wieder, und was soll ich sagen? Ich hatte recht…
Welcome Back to Astro, dem Hobby bei dem meistens einfach nix funktioniert.
Es stellte sich raus einer schaltet sich aus wenns ihm grade passt, der andere hängt sich ganz gerne mal auf, Sehr erbauend… Das veranlasste mich dazu mich erstmal DARUM zu kümmern. Und DAS führt mich zum nächsten Kapitel.
Die Steuerung und Ihre Tücken
Ich begann also damit, mal den alten, den kleinen PC Stick an einen freien Monitor anzuschliessen und gleich mal ein Kubuntu-Betriebssystem da drauf zu installieren. Warum jetzt Linux, werdet ihr euch fragen, und zurecht. Das kommt daher, dass ich, als ich in das Remote-Steuerungssystem eingestiegen bin mit KStars/Ekos unter Linux begonnen hatte. N.I.N.A gabs da noch nicht und ein Windows-System wollte ich als eingefleischter Mac Fan ja sowieso nicht haben. Und was soll ich sagen? KStars läuft auf dem Mac…
Der Grund warum ich etwa 2 Jahre später nach Windows/N.I.N.A gewechselt hatte war einzig und allein ein Driverproblem mit meiner damals neuen Starlight-Express Lodestar X2 Guidingcam. Linux bzw. Kubuntu war da nicht mal Schuld daran, aber das wusste ich da noch nicht…
Der Zweite Grund war, dass ich auf dem jüngeren und besseren MeLe PC Stick ja ein (vermeintlich) funktionierendes System hatte das ich ja für das neue Setup immer als Fallback nutzen könnte. Die Idee war einfach einen Stick mit NINA, einen mit KStars. Da muss ja zumindest eines davon funktionieren…
Also Linux drauf und dann gings los. Absturzorgien im 10-Minutentakt. Hier bin ich nach etwa eineinhalb bis zwei Stunden ausgestiegen, und hab meinen anderen, besseren, schnelleren und vor allem fertig funktionsfähigen Stick zur Hand genommen. Nur, der startete erst gar nicht. Etwa eine Stunden DANACH hab ich mit leicht erhitzem Gemüt beschlossen, was solls, ist eh alles neu, also Festplatte glattbügeln und dann eben hier Kubuntu drauf mit KStars.




Auch hier gabs Abstürze und jede Menge sehr schräges Verhalten des Sticks. Und, Ihr kennt das ja, was da folgt. Google, diverse Foren, Facebookgruppen, Discord usw. um draufzukommen, was denn da das Problem ist. Und das Problem war eine wohl nicht ganz koschere Kubuntu-Version. (Oder zumindest eine die nicht wirklich gerne mit PC-Sticks redet). Und DAS kombiniert mit einem mittlerweile offensichtlich kaputten PC Stick, und einem anderen, der halt einfach total unterdimensioniert ist. Im Grunde halt alle beide unbrauchbar. Klar, man geht dann mit dem Gedanken ich lass das jetzt, macht ja keinen Sinn usw… Aber nach einer Stunde denkst dir halt OK, das muss ich jetzt auch noch versuchen usw… Hab dann nochmal ein anderes Ubuntu Image gezogen und dann, trotz einiger Abstürze während und auch nach der Installation, einen der Sticks halbwegs mit KStars zum Laufen gebracht.
Da kam mir dann der Gedanke den neuen Stellarmate pro zu kaufen. Im Grunde ja nichts anderes als ein Mini PC mit KStars auf einem Linux System, also GENAU DAS was ich grade zu bauen versuchte; nur mit neuerer Hardware. Und zwar richtig guter Hardware, so schaut es zumindest aus. Aber über 700€ ?
Hätte ich nicht bereits eine einige 100€ teure Pegasus-Powerbox Advance auf meinem Teleskop montiert, die mir alle Geräte mit USB und Strom versorgt, ich hätt mir den Stellarmate geholt. Aber da kam mir bei meiner Facebooksuche in meiner vor ein paar Jahren ins Leben gerufenen, deutschsprachige KStars/EKOS/INDI Gruppe der gute Wolfgang Birkfellner zu Hilfe. Er bot mir an mir beim Aufsetzen eines KStars Systems auf einem neuen Raspberry-Pi 5 behilflich zu sein. Danke nochmal dafür Wolfgang.
Also Raspi5, Netzteil, Gehäuse, Zubehör. Bestellung ist raus…
19.02.2024 Montag Ruhetag…
Konsolidierungsphase
Beim nächsten freien Schlechtwettertag, begann ich mal, mich hardwaretechnisch zu sammeln. Was hab ich noch, was ist verkauft. Man kann da schnell mal den Überblick verlieren.
Ich hab dann beschlossen den 10” Newton mal ins Büro zu verfrachten. Schliesslich ist da noch die ganze Steuer Hard-, und Software drauf montiert. Mal sehen ob das alles noch so läuft wie gewohnt.

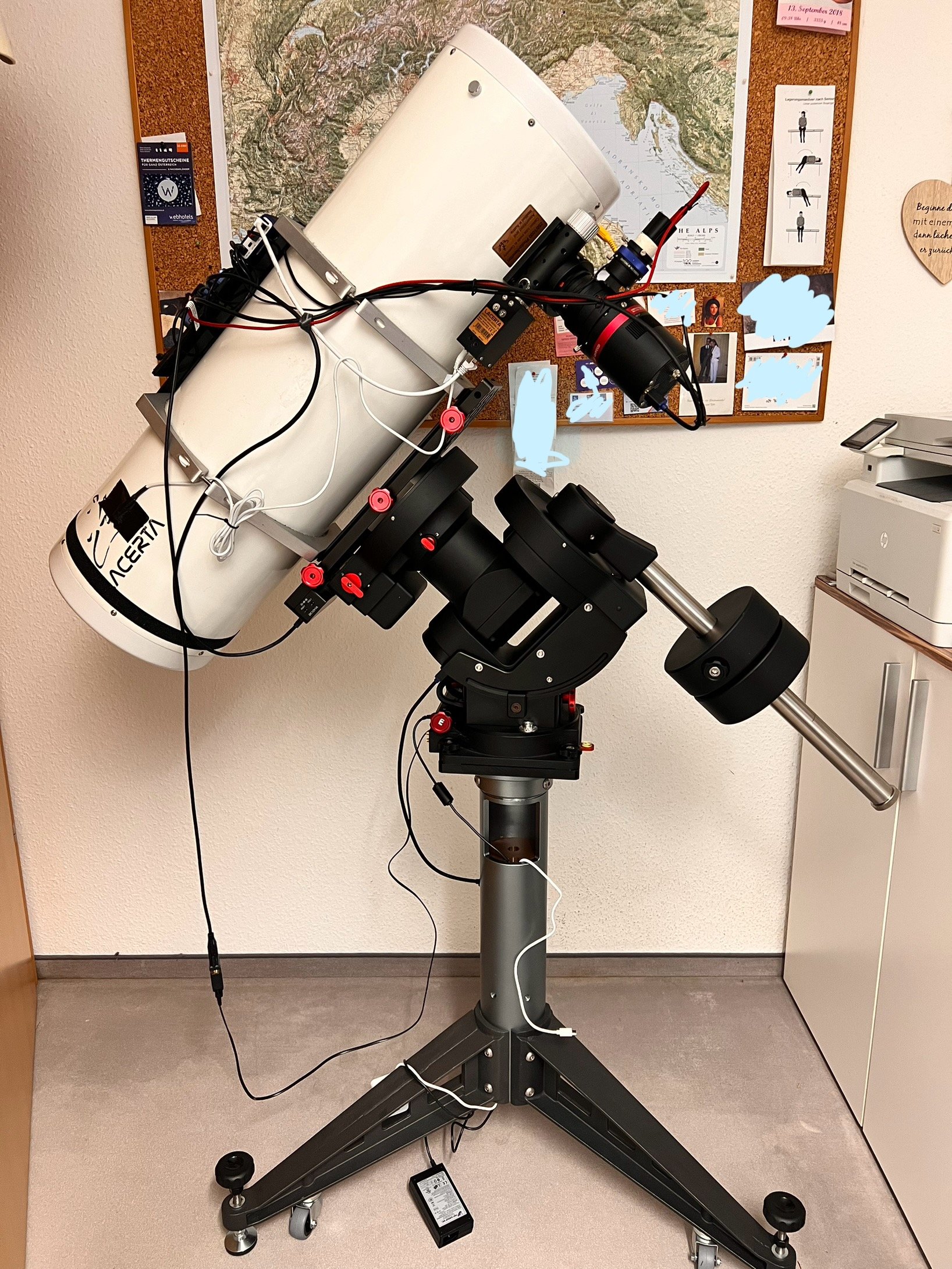
Die CEM 120EC2 mit dem provisorisch montierten Lacerta 10” f/4 Carbon-Fotonewton. Auf der rechten Seite kann man den montierten Lacerta MFoc erkennen, und oben drauf die im 3D Druck Selbstbauhalterung für das “alte” Steuerungsgedöns.
Da das Achsenkreuz der CEM 120 ja 26kg schwer ist, bot es sich an das Ding mal im Büro aufzustellen und den Newton vorsichtig draufzuhieven. Aufpassen muss man natürlich, aber ich hab schnell festgestellt, dass das ganze gar nicht so einfach umzuschmeissen ist. Jo und da steht es jetzt gerade neben mir, wie ich diese Zeilen schreibe.
Ich holte also alles mal her was man so braucht, ist ja alles fürn Verkauf fertig verpackt im Schrank. Also auspacken. Die QHY 268C, die Lodestar X2, der Pegasus ist ja eh schon am Teleskop ebenso wie der Mfoc. Also alles mal irgendwie verbinden mit dem Laptop dann sehn wir schon…..noch viieeeeeel mehr Probleme…
Die QHY connected nicht, die Montierung sowieso nicht, nur der MFoc und die Lodestar melden sich ohne Gezicke sofort. Gut, zwei von vier, mal sehen. Zwischendurch immer der Gedanke dass das eigentlich ja eh Käse ist weil ich weder den Laptop noch die Sticks am Ende nutzen werde aber man wird ja noch probieren dürfen. Also erstmal zur CEM. Anleitung rauf und runter und Forenfragen zum Thema: Die hat doch USB, die steck ich doch einfach per USB an. Das ist ja so toll, da brauch ich kein EQDir Kabel mehr wie bei den Skywatchern. Das Ergebnis: NEIN, brauchst du nicht, halt unter Windows. Unter Indi muss das per RJ9/RS232/USB Adapter passieren. Ist mir schleierhaft warum das so ist, aber es ist so. Tatsächlich hab ich sogar noch so einen Adapter rumliegen. Etwas unhandy, aber sollte gehen. Also mit Adapter versucht. Keine Verbindung. —> Forensuche —> Die braucht wohl ein Firmware update…
Das nennt man wohl vom hundertsten ins tausendste. Also Firmware update. Mittlerweile ist übrigens…
Dienstag der 20.02.2024
To connect, or not to connect, that is the question
Kaum zu glauben aber am Ende braucht man IMMER einen Windows PC, spätestens beim Firmware updaten.
Nach ein paar irreführenden Verbindungsproblemen und kurioser Anleitungen dann Erfolg. Neue Firmware auf der CEM und mit etwas Problemen auch an der Handbox. Die hat vorher ja auch nicht funktioniert, und mir so mitgeteilt, dass das Firmwareupdate nötig ist. Dadurch hab ich auch rausgefunden, dass der Adapter von RS232 auf USB DOCH funktioniert. Dachte vorher der ist auch kaputt aber das geht dann doch zu tief hier. Und dann hatte ich es auch noch innert 5 Minuten geschafft bei der Spracheinstellung der Handbox (ich hatte nach Deutsch gesucht, gab es nicht) den englischen Text in schwarze Blöcke zu wechseln. Handbox somit unbrauchbar. Man könnte jetzt wohl sagen egal, die brauch ich eh nicht, aber das Ego…
Also erst noch ein Stunde damit verbringen, die Menüstruktur als Grafik zu suchen, mich durch die Menüschritte zu zählen und dann englisch GsD wiedereinstellen zu können. Super, funktioniert. Dann kann ich die Handbox jetzt ja wieder verpacken.
Der Adapter ist recht unglücklich gebaut und würde den Zug nicht lange aushalten also doch noch ein neues Kabel. Bestellung ist raus.
Und weiter mit den Verbindungstests. Mit viel Hilfe aus dem Dark Matters Discord hab ichs dann geschafft die Montierung zu verbinden. Und dann konnte ich ich auf mein Sorgenkind konzentrieren. Die QHY 268c. Ist ja in dem ganzen Szenario nicht grade unwichtig. Sie reagierte also nicht am Linux-Stick, nicht am Linux Laptop. Also INDI Problem. Foren—>Discord—> Nix. OK. Dann mal an Windows/N.I.N.A, der Laptop ist Dual-Boot, da ist noch N.I.N.A drauf. Also testen wir das mal. OK, erst mal updates… Also testen und? OK, die Cam geht. Puh… Das wär jetzt bitter gewesen. Nächster Test. Kstars am neuen Mac-Mini. Schnell installieren und testen. Cam geht… OK, das wär jetzt aber INDI… Als irgendwie doch kein INDI-Problem?
Die Antwort kam wieder ausm Dark Matters Discord. Bekanntes Problem. Die verwendete Ubuntu-Version lädt die USB3 Cam nicht ins USB3-Universum, das ist halt meine Erklärung. Ich programmiere also der Anleitung folgend ein wenig rum (ich nenne das so wenn ich Code aus dem Internet kopiere und bei mir ausführe 😆) und siehe da. Am Abend es Dienstags die Bestätigung. Alles an Hardware funktioniert mal.
Also das Gastronomen-Wochenende sinnvoll genutzt. Alles an Adaptern, Kabeln usw bestellt. PAUSE.
21.02.2024
Paketflut
Es ist Abend. Die ersten Pakete sind da. Ein paar Adapter die ich erst später brauchen werde. In der Zwischenzeit hab ich durch die viele Zeit im Discord auch paar neue Freunde kennengelernt und mal nur da bissl gechattet. Als ich nach dem Serienabend dann noch mal gegen 23:00 im Discord hängen blieb, hatte ich bei einem Absacker (Edradour 12 Jahre alt, unverdünnte Abfüllung, Bourbonfass 58,2% vol.) die geniale Idee, diesen Blog hier zu verfassen. Und DAS könnt ihr am Datum gut erkennen :-)
22.02.2024
Der Raspberry Pi5 mit Zubehör und das neue RS232/USB Kabel sind da. Ich dachte nicht dass der SO klein ist.

Raspberry Pi 5 mit Case und RTC-Batterie
Soweit so gut. Während ich auf Teile Warte nun also die Kamerabaustelle. Ich hätte jetzt gerne an der QHY268C eine Filterschublade UND einen OAG. Und die Filterschublade sollte hier auch das Erste sein dass nach dem Sensor kommt, erst dann der OAG. So könnte ich das Problem lösen dass die Guidecam durch einen z.B. Duo-Narrowbandfilter schauen muss. Anfrage DAZU ist ebenfalls raus an meinen Mann bei Baader.
UND heut kam die Versandbestätigung für das Geoptik-Stativ. Bin mal gespannt was das kann.
23.02.2024
Die Säule mit den Rädern
WOW, das ging schnell. Das Geoptik Stativ ist da. Ich muss sagen, ich bin echt beeindruckt. Schaut sehr stabil und wertig aus. Alles sehr groß dimensioniert. Das sollte klappen. Also schnell zusammengebaut und mal getestet wie das jetzt funktioniert.








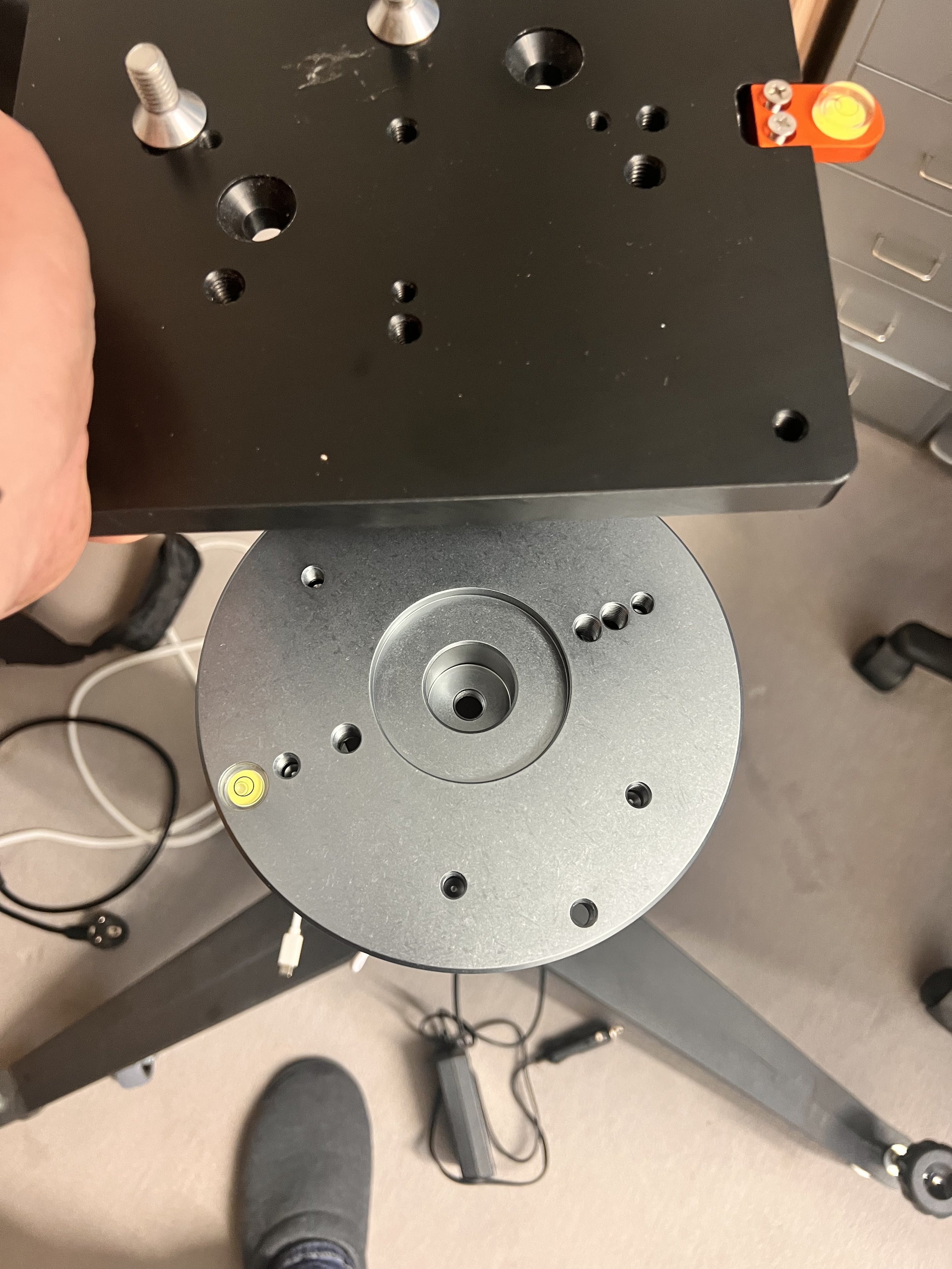
Der Adapter kam mir beim Bestellen schon komisch vor, aber auf Nachfrage würde der wohl passen. Tja, leider tut er das natürlich nicht. Das würde bei dieser Odyssee ja auch gar nicht ins Bild passen. Der Adapter ist rund und zu klein, der Fuss der CEM rechteckig und viel grösser. TS ist kontaktiert. Mal sehen wie problematisch das jetzt wird.

Rund und klein auf eckig und groß geht sich hier mal sicher nicht aus…
26.02.2024
Erstmal ist nicht viel passiert ausser ein paar Kabellieferungen und dem original-Netzteil für den Raspberry Pi. Hatte noch etwas Korrespondenz mit TS, da kam aber bisher nix raus. Hab dann mit Geoptik direkt Kontakt aufgenommen und nachgefragt ob die eine Adapterplatte die eigentlich für das Geoptik Hercules Dreibeinstativ gedacht ist, nicht auf meinen runden Adapter passen würde, und das wurde mir bestätigt. Somit mal wieder: Bestellung ist raus.

Das ist jetzt gut zu wissen, dass das klappt, da ich mir die unten offene Bauform der Säule zu Nutze machen werde. Ich werde den Strom da durchfädeln und mit noch eine Halterung für den Raspi drucken. Dieser kommt dann in die seitliche Ausnehmung der Säule und ist somit etwas geschützt.

Die Ausnehmung für Kabel und den Raspi
Und da kam mir gleich der Gedanke, dass man im unteren Teil des Stativrohres auch gleich ein paar Netzteile unterbringen könnte. Ich brauch ja doch Eines für die Montierung, eine für die Pegasusbox, und da ich den Raspberry Pi unten lassen werde, auch für den einen Platz am Strom. Dann werd ich das Kabelmanagementsystem der CEM 120 nutzen, um nach oben zu kommen. Und es sind viele kurze Kabel bestellt, damit das ganze mal aufgeräumter wird am Teleskop.

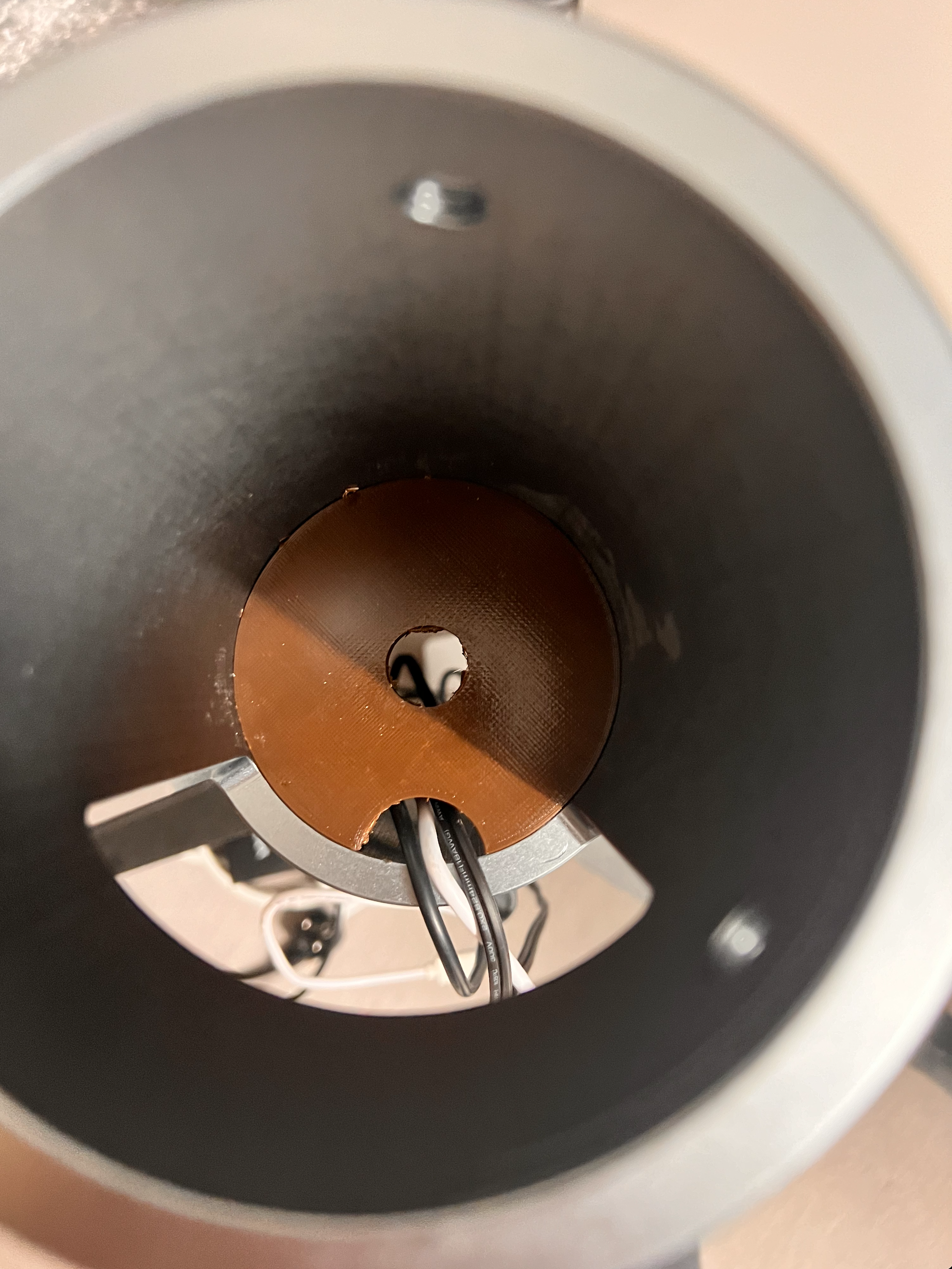
Das erste Teil ist mal fertig. Ein kleiner Zwischenboden mit Kabeldurchführungen da kommt von unten der Strom, und gleichzeitig hat der Raspi ein Plätzchen.
28.02.2024
Es kamen die Tage wieder einige USB-Kabel in besseren längen um das ganze System mal etwas “schöner” zu verkabeln. Ich weiss dass die paar Menschen die diese Zeilen unter Umständen mal lesen werden, gerade sehr genau wissen, was ich meine…
Viel wichtiger aber heute kam die Adapterplatte von Geoptik, nach direkter Korrespondenz mit Ezio di Bonafini von Geoptik in Verona. Ich muss sagen das ging echt schnell. Nachdem ich am Montag nach kurzem Hin und Her die Platte am Abend bestellt hatte, war die heute Vormittag schon da.


Imagetrain: Ready
Dann hatte ich ja auch Korrespondenz mit Baader. Es ging um die Adaption einer Filterschublade UND eines OAG an meiner QHY268C (alte Version mit dem Schwalbenschwanz-Adapter und dem langen Backfokus) QHY bietet ja jetzt eine eigene Filterschublade an. Die ist aber leider nur für die neue , bzw. die Mono Version der 268-eer geeignet, eben wegen dem sonst zu langen Backfokus. Baader hat da mit dem Baader UFC eine eigene Lösung, die wesentlich schmäler wäre, und das würde auch funktionieren. ABER… ICh würde die Filterschublade gerne ZWISCHEN OAG und Hauptkamera einbauen, da sonst die Guidingkamera ja auch durch den Filter “schauen” muss. Und das wird spätestens mit einem Duo-Narrowbandfilter zum Problem. Nach kurzer Korrespondenz die Antwort: Geht nicht.
Na gut dann nicht. Der Imagetrain der QHY hat einen Schraubfilterhalter integriert, man kann also einen Filter indem man den Imagetrain zerlegt innen einschrauben. Das ist zwar umständlich, aber machbar. Mit der neuen Cam ginge es ohne aber da ist ein nicht zu vernachlässigendes “Feature” bei der alten Version, das ich nicht missen möchte. Und zwar kann man durch den Schwalbenschwanzadapter ganz hinten am Imagetrain, die Kamera manuell rotieren, OHNE den ganzen Imagetrain im Okularauszug drehen zu müssen.
Ich weiss, das sieht jetzt aus als würde das verkippen, aber das passt sobald man die Schrauben fixiert 100% und ist immer im Fokus. Langer Rede kurzer Sinn. Ich habs gelassen und einfach nur den originalen OAG-M von QHY bestellt, ebenfalls am Montag. Und der kam ebenfalls heute.
Aufstellung
Grund genug mal zusammenzubauen und die Montierung aufs Stativ zu stellen. Was dann so aussieht.


Ich habe dann mal begonnen ein wenig am Kabelmanagement zu arbeiten und die diversen richtig langen USB und Stromkabel zu montieren. Und da das ganze ja jetzt zusammengebaut war, hab ich auch die Gegengewichte montiert und mal halbwegs austariert. Musste noch den Newton IN den Schellen ein wenig verschieben da sonst der Motorfokus im Weg ist, aber jetzt sollte es klappen.
Der untere Deckel der Säule, der dafür sorgt dass die Netzteile gesichert sind und in der Säule verbleiben, ist auch in Version 4 fertig konstruiert und hat jetzt sogar eine Art Bajonettverschluss. So fällt er nicht raus, ist aber einfach abnehmbar. Da hat mein alter 3D-Drucker auch mal wie der den Staub vom Heatbed geblasen.
Die Konstruktion des Deckels mit Bajonettverschluss

Der fertig gedruckte Deckel. Hatte nur noch PLA in Holzoptik…
Ja ich weiss, der Druck ist nicht schön, aber hatte keinen Bock jetzt rumzuoptimieren. Aber es hält und ist stabil. Tut was es soll, basta.
01.03.2024
Gestern hab ich mal versucht das ganze System zu balancieren. Dass das nicht ohne Probleme vonstatten gehen würde hat mir ja der Herr Murphy vorher schon gesagt. Das Problem ist, dass der Newton recht Kopflastig ist und daher in der Prismenschiene recht weit zurückgeschoben werden muss. Jetzt ist der Sattel der CEM120 im Vergleich zur EQ6-R echt massiv größer und da entsteht das Problem, dass der Motor des Lacerta Motorfokus MFoc mit dem Kabel an den Sattel der CEM gerät, und ich das ganze nicht mehr weiter zurückschieben kann. Das gemeine daran ist, dass es ECHT knapp ist. So kanpp, dass es ohne montierte Taukappe noch ausgehen würde, aber mit der Taukappe leider nicht mehr.

Das Kabel des MFoc (Patchklabel) steht am Sattel an.
Mein erster Lösungsversuch, ist jetzt mal ein Netzwerkstecker mit 90° Winkel, weil das ja sowieso nicht schön aussieht. Versuch 2 wäre mal die Idee ans “Heck” des Newton Felgen-Wuchtgewichte zu kleben. Es geht hier wirklich um ein paar hundert Gramm. Wenn das immer noch zu wenig ist, dann muss wohl ein richtiges Gewicht montiert werden. Aber erstmal versuch ichs mit den Wuchtgewichten.
Dann kam heut noch mein UV/IR Cutfilter, der ist schon am GPU Komakorrektor. Also im Grunde bin ich bereit. Fehlt noch der Steuercomputer, bzw. die Fertigstellung desselben. Dann werd ich mal gemütliche Indoor-Steuerungstests starten.
04.03.2024
Hardware-Finish
Gestern kamen wieder ein paar Pakete. Filament für den Drucker hauptsächlich, aber auch ein, wie könnte es anders sein, Kabel. Um genau zu sein das 90° abgewinkelte Netzwerkkabel für den Anschlussdes MFoc um mehr Platz zwischen Sattel und MFoc zu gewinnen. Das passt perfekt.

Das abgewinkelte Netztwerkkabel.
Dann gings mal um das “Verräumen” der Netzteile IN der Säule. Da wo ich mir den Deckel dafür gedruckt habe. Ich muss schon sagen, das funktioniert echt super. Unten an der fahrbaren Säule kommen nur noch die Stromkabel raus, der Mehrfachstecker wird noch auf ein Stativbein montiert und ich kann das komplette Ding gemütlich durch die Gegend schieben.


Der Deckel hält die beiden Netzteile im inneren fest und etwas geschützt. Oben am seitlichen Auslass der Säule kommen dann die Kabel wieder raus. 2 mal Strom für Montierung und die Pegasusbox, und in weiss der Strom für den Raspberry Pi. Der Bleibt dann in der Ausnehmung am Zwischenboden. Verbunden wird er dann mit dem Kabelmanagementsystem der Cem120 nach oben zur Pegasusbox.
Das Problem mit der Balance konnte ich mit Lösungsversuch Nummer eins auch in den Griff bekommen. 2 Ringe aus Wuchtgewichten für Fahrzeugfelgen haben das Problem gelöst. Sie sorgen für das bisschen Zusatzgewicht das ich hinten noch gebraucht habe um perfekt in Balance zu kommen.



Jetzt noch ein wenig Kabelmanagement, erstmals mittels einfacher Draht-Kabelbinder, damit das ganze nicht ganz so unaufgeräumt aussieht. Die GPS-Maus hab ich auch an eins der Stativbeine geklebt und die letzten Kabel halbwegs sauber verlegt. Jetzt muss noch den Newton mal aussen putzen und dann wär ich bereit für erste Systemtests. Den Spiegel hab ich offensichtlich vor dem Verpacken letztes Jahr nochmal ordentlich gesäubert. Nächster Aufgabe also den Raspi fertig machen und mal erste Indoor Softwaretests machen und sehen ob die Verkabelung und das alles so funktioniert.





14.03.2024
Nicht viel passiert die letzten Tage. Der Raspi verzögert sich etwas. Daher hab ich beschlossen erstmal mittels Laptop Indoor-Verbindungstests zu machen und zu sehen wie ich verkable und ob das alles so geht.
Und wie könnte es anders sein, neue Probleme. aber der Reihe nach. Wir haben nun also das Netzteil der Montierung im Fuss der Säule am Strom der Montierung. Dann das 10 Amp Netzteil am Power-Eingang des Kabelmanagementsystems der CEM. Da kommt dann oben am Sattel 2mal 5Amp Stromanschluss raus. Von da hab ich ein Kabel zur PBA am Teleskop. Dann vom Laptop per USB-3 in das USB3 Managementsystem der CEM, das ebenfalls oben rauskommt und von da ebenfalls USB3 an die PBA. Dann noch über einen kleinen Umweg mit Doppelseitigem Klebeband Das RS232-Kabel von der CEM via Adapter an den USB der PBA. Lacerta MFoc, die QHY 268C und die Lodestar X2 ebenfalls an die PBA. Strom für die ganzen Geräte auch von der PBA.



Laptop ran, updates werden gefordert, mach ich mal gleich. Alles fertig KStars starten, Profil Einstellen und mal versuchen. Es meldet sich die Guidingcam und der MFoc, sonst nix. OK, ich weiss da war immer ein Problem mit einem der Ports an der PowerBoxAdvance, also ein wenig Ringelpiez mit den USB Steckern. Das Ergebnis: Ich hab das Gefühl ein Port der PBA ist kaputt. Und zusätzlich hatte ich eine Art Wackelkontakt. Bin am Stromstecker der zum zweiten Netzteil geht gestreift und dann war mal gleich der Strom weg. Das Problem ist dass die CEM teilweise 2,5mm Innendurchmesser bei den Stromsteckern hat, und teilweise 2,1mm. Da musste ich auch erst draufkommen. Denn die meisten Kabel die ich hab sind 2,1mm. Na gut, ich hatte dafür ja einige Adapter bestellt, nur an dem Stecker war der etwas locker. Hab dann aber einen alternativen Adapter bestellt, das ist jetzt kein so großes Problem.

Der Ausgang am Sattel. Hier kommen 2mal 5Amp der 10Amp des zweiten Netzteiles an. Einmal mit 2,5mm innen, einmal mit 2,1mm. Von hier zum USB-Hub und zur PBA. Links sieht man auch den Adapterstecker von 2,5 auf 2,1
Hab das mal zurückgestellt und angefangen zu checken was da mit den USB-Verbindungen nicht hinhaut. Liegt wohl am kaputten Port. Mail an Pegasus Support ist raus, und Frage im Discord von Dark Matters auch. Ich muss ins Bett, Gute Nacht…
15.03.2024
Frühmorgens den Discord gecheckt und mal gleich die Info bekommen, dass bei der GEN 1 der PBA die ich nutze EINER der USB Ports NUR USB3 und nicht USB 2+3 ist. Das ist wohl das Problem. Nach ein wenig Recherche bestätigte sich das Problem heute Abend. Das, was ich will geht nicht. Ich kann wegen eines, nennen wir es mal “Designfehlers” der PBA nur 3 von 4 Ports nutzen. Na toll, dann muss wohl noch ein HUB draufgeladen werden…. Hab das dann getestet und mit dem HUB funktionierte nach etwa einer Stunde herumprobieren dann alles, soll heissen, alle Geräte verbunden. Das ist schon mal ne Leistung.
Das bestellte Adapterkabel für den Stromanschluss kam heute auch. Mit diesem Adapter funktioniert es, auch wenn das Kabel schon SEHR dünn wirkt.
Na dann wollen wir mal. Software-Montierungssteuerung starten und mal sehen ob sie sich bewegt. Tadaa, funktioniert. Noch in “ausgekuppeltem” Zustand. Mir ist das System auch neu, aber die CEM120 hat pro Achse 2 Drehschalter. Einer ist um das Getriebe ein, bzw Auszukuppeln, der andere um die Achsen bei ausgekoppeltem Getriebe zu fixieren. Die Steuerung ahb ich erstmal bei ausgekuppeltem Getriebe getestet und nachdem das funktionierte, mal eingekuppelt. Siehe da, es bewegt sich. Der “Sound” ist für mein Empfinden ziemlich laut und kratzig. Ich hoffe das passt so und drücke auf Park, um nach den Testbewegungen wieder zum Ausgangspunkt zurückzufahren. Und was macht die CEM? Sie fährt in die andere Richtung. Da war mal kurz Alarm weil Indoor und Wände… Und beim retten der Situation fiel mir ein komischer ton in der DEC auf. Da stimmt was nicht… die DEC-Achse lässt sich trotz eingekuppeltem Getriebe per Hand relativ leicht bewegen, und das mit einem SEHR unangenehmen Ton dazu… Das klingt nach “da raffelt was über ein Zahnrad”…
Der “Sound” der wohl zu losen DEC-Achse
Nach kurzer Nachschau fand ich ein Youtube Video in dem erklärt wird wie man eine zu lockere DEC der CEM120 korrigiert. Das schien zum Thema zu passen und so fand ich die Einstellschrauben für die DEC Achse. Hab dann justiert und die zu leicht gehende Achse mal etwas festgezogen. Test steht noch aus weil ich mir dachte, ich schreib jetzt mal am Blog weiter. Und da bin ich grade dabei, um 22:28. Aber ich bin wieder einen Schritt weiter gekommen.
Als nächstes werd ich mal den USB-Hub neben der Pegasus Power Box Advance montieren. Schade, aber nützt halt nix…
03.04.2024 (eigentlich 04.04.2024, aber gestern wurde lange, daher heute Text…)
Lange nix passiert aber ist normal, schliesslich war Ostern. Hatte einen Arsch voll Arbeit und zusätzlich zum normalen Unternehmerwahsinn kommt jetzt noch die Garagenbaustelle. Ja auch die ging jetzt doch etwas überstürzt los. Aber immerhin, ein Schritt näher zur Sternwarte.
Der Raspberry Pi 5 war nun also gestern dran. Nachdem ich das System aufgesetzt hatte, KStars installiert war und ich auch den VNC Server für die Fernsteuerung soweit zum Laufen gebracht hatte, hab ich den Raspi jetzt mal zu Testzwecken ans Teleskop montiert und verkabelt.
Raspi via WLan erreichbar. Los gehts. Profileinstellungen in KStars machen und mal auf verbinden klicken. Der MFoc ist, da, ebenso wie die echt brave Lodestar X2. Montierung nein; QHY268c nein; Nur die Pegasus Pocket Powerbox Advance, die ist auch da.
Also gut, Kontrolle, Anpassungen, Montierung sporadisch da, die QHY? Fehlanzeige.
Mein erster Weg mittlerweile ist hier immer der Discord von Dark Matters. Den ging ich aber erst später am Abend an, vorher bissl Streaming… Naja…
In der EKOS/KStars Sektion von Dark Matters waren gottlob die Spezialisten online und schalteten sich gleich auf meine Probleme auf. Allen voran @weber, Danke auch hier nochmal; Für die Hilfe und den unterhaltsamen Abend.
Das QHY-Problem war das selbe wie schon mit allen INDI-Systemen. Dieses Problem mit FX Load. Die QHY wird einfach nicht im USB3 Umfeld erkannt. @weber und ich, naja ich hab Screenshots von den Befehlen gemacht die er mir “angesagt” hatte, bzw. vom Output der auf diese Befehle folgte. Long Story Short er hat da etwas in meinem Raspberry Pi System umgestellt, sodass die QHY 268C nun anstandslos erkannt wird. Und das hat ECHT LANGE gedauert. So gegen 0:30 früh wars dann am laufen. Voreher so zwischendrin hatte ich es geschafft die Montierung zu connecten, das war wohl ein BAUD-Raten Problem.
Am Ende der Session bat mich @weber darum nun das System wieder so zu verkabeln wie es vorher war. Wir hatten mal alle anderen Geräte rausgenommen, und nur die Cma direkt mit dem Raspi verbunden. Und dann eben der Schockmoment des Abends. Ich hatte die PBA vorher vom Strom genommen, und wollte die nun wieder anstecken, da Sie ja alle Geräte mit Strom versorgt. Und da hatte ich, im beengten Raum meines Büros zuhause, übeer das Teleskop drübergelangt und, wie soll ichs formulieren, “blind” versucht den Strom anzustecken. Mit dem Ergebnis dass ich ein “Brizzeln” oder “Bruzzeln” gehört hab, gefolgt von einem süßen kleinen Rauchwölkchen.
Kannst du dir nicht ausdenken. Es schien nicht so dramatisch zu sein, die PBA hatte weiterhin Strom geliefert, und alle LED´s leuchteten, aber irgendwie keine USB Verbindungen mehr…
Nunja, vorher war ja Erfolg, die QHY hatte verbunden und ich beschloss, dank 2 Gläsern eines wunderbar karamelingem, fast schon süßen, und serh milden 20 Jahre alten “Glenlossie” das ganze nun zu beenden und schlafen zu gehen. Eine weise Entscheidung.

20 Jahre alter Glenlossie vor kopierten Linux Befehlen…
Heute Abend dann nach der Arbeit der Test. Was war passiert. Ich startete also ohne große Erwartungen das System nach Kontrolle aller Verkabelungen. Startete VNC am Mac. Verband mich mit dem Raspi. Startete KStars. Startete mein Profil; und?? Alles Verbunden, bis auf die Montierung… Was ist jetzt wieder? Oh, ausgesteckt. Warum auch immer. Naja war ne lange Nacht mit Whisky. Montierung angesteckt. Alles da. Auch die PBA. Keine Ahnung was da genau geraucht hatte, aber wahr wohl nicht so schlimm.
Mit anderen Worten. Ich bin bereit für Tests vor der Türe. Ich werde berichten. Aber erstmal neue Priorität. Die Baustelle…

Unsere Garagenbaustelle in vollem Gange
08.04.2024
Nach einem wundervollen aber auch brutalen Wochenende in der Arbeit, 2 schöne freie Tage mit aufgeheizten Temperaturen um die 30° hier in Tirol, machte ich mich an weitere Tests mit meinem Astrosystem. Wie viele im Discord von Dark Matters schon mitbekommen haben, gabs dann schon noch Probleme mit der Verbindung zur QHY 268C.
Am Sonntag Abend, den 07.04. hatte ich eine lange interessante Diskussion mit vielen Leuten aus dem Dark Matters Discord, der aber auch recht fruchtbar war. Die Info von Frank Sackenheim, dass er wohl einen Stellarmate Pro zum Testen bekommt, hat mir zu denken gegeben. Im Grunde eigentlich ein Bundle aus einem Computer mit der KStars/EKOS Software die man kaufen kann. Da hat man halt einen vollwertigen Astrocomputer, mit USB Hub für alle Geräte, Stromversorgung usw. Da von einigen angenommen wurde dass meine Cam ev. kaputt sei, hab ich mir gedacht jetzt test ich das erstmal am Montag (Freier Tag) alles durch. Also Cam an den Laptop mit Dualboot. Ich hab da einmal Windows mit N.I.N.A. drauf und ein Ubuntu mit Kstars. Da wurde es dann richtig spannend. Die Cam also unter NINA getestet, mit mäßigem Ergebnis. Konnte zwar verbinden, aber die Bilder alle eiss. Wird wohl eine Einstellung sein in NINA, aber die Tatsache dass keine Fehlermeldung kam, hat mich schon mal positiv gestimmt. Dann der Test mit dem Ubuntu System. Da wurde, wie vorher unter Windows, meine Cam erstmal nicht richtig erkannt.
Um dann zu checken ob nicht etwa doch ein Problem mit der Cam besteht fiel mir ein dass ich auf meinem neuen MacMini M2 ja eh eine aktuelle Version von KStars installiert hatte. Also Cam dran und TADAAA, sofort verbunden, sofort richtig erkannt, und auch Testbilder, wie sie sein sollen.
Also: Die Cam geht.
So. Parallel dazu immer im Discord unterwegs dachte ich wieder an Frank. Das animierte mich mal auf der HP von Stellarmate nachzusehen, was denn mit deren Software, dem Stellarmate OS, so los ist.
Und da stand dann dass es das mittlerweile wohl auch für den Raspberry PI5 gibt. Preis $ 59,-

Da hab ich kurzerhand beschlossen, das test ich jetzt mal. Ich vergewisserte mich noch im Discord, dass man beim PI einfach ein anderes System auf die SD schreiben kann, und diese dann tauscht. So war das auch also: Gekauft.
Und DAS war jetzt mal die User-Experience die ich schon lange gesucht hatte.
Also Software gekauft. 5 Minuten. Download 5 Minuten. Image auf die SD schreiben 10 Minuten. Das ging so fix, da ich bereits wusste wie man sowas macht, und auch die Software dafür, in meinem Fall “balenaEtcher”, schon installiert war.
Speicherkarte in den Raspi und Starten, 2 Minuten.
Und dann war es da:

Als ich mit Astrophotografie anfing, war KStars die Software meiner Wahl. Hatte ich so online gefunden, N.I.N.A. gabs noch nicht und andere Software kostette Geld. Über die Installation lernte ich ein bisschen die Linux-Welt kennen, und in diesem Zuge auch Jasem Mutlaq aus Kuwait, dem Mann der hinter dem Stellarmate-System steht. Ich hatte einige Teamviewer Sitzungen mit ihm, in denen er mir als absolutem Anfänger mit diesem Thema sehr geholfen hatte.
Ich hatte dazu vor ein paar Jahren eine Facebook-Gruppe in deutscher Sprache für KStars gegründet, um die deutschsprachige Community was KStars angeht ein wenig zusammenzubringen. In der Zwischenzeit hab ich über diese Gruppe Wolfgang Birkfellner kennengelernt, der an der MedUni Wien arbeitet und ebenfalls Astrophotografie mit KStars betreibt. Wolfgang war so nett, die Gruppe als Admin zu betreuen, da ich in der Zwischenzeit wegen Treiberproblemen zu Windows mit N.I.N.A. gewechselt war.
Und nach einer längeren Pause in den letzen 2 Jahren, kam die Verbindung zu Wolfgang auch wieder ins Spiel. ER war derjenige der mich überhaupt erst auf die Idee mit dem Raspberry PI5 und KStars brachte.
Aber zurück ins Heute:
Ich bin begeistert. Ich hab mein Profil im Stellarmate OS erstellt. Die QHY hat sofort verbunden, und die Testbilder machten Sinn. Super. Dann also raus mit dem Raspi in die Wildnis, respektive das Teleskop-Setup vor der Tür. Alles verbunden. Start. OK, also die Montierung zickt noch aber alles andere Verbunden. Nach ein paar Tests war ich dann tatsächlich so weit, dass ich sogar den USB-Hub entfernen konnte, und den Raspi am Teleskop montieren konnte.


Hab dann noch alles so sauber wie möglich verkabelt und bin jetzt tatsächlich soweit, in richtung Bilder zu gehen. Also als nächstes, wenn das Wetter passt. Fokussieren ist angesagt, und den Fokus auf den OAG synchronisieren. So long.
09.04.2024
Das Wetter war mir wohlgesonnen und machte erste Fokusstests möglich. Das System ist stabil. Keinerlei Abstürze oder Verbindugsprobleme mehr. Das ist echt mal angenehm und war eine große Hürde auf dem Weg zu neuen Deep-Sky Bildern. Also hab ich das ganze mal an den angedachten Platz geschoben und grob mit dem Kompass eingenordet.

Das Teleskop am Beobachtungsplatz
Da die Montierung kein Polarscope besitzt, muss man sich eine andere Möglichkeit suchen. Per Software einorden hatte ich schon mehrfach gemacht mit N.I.N.A. aber noch nicht mit KStars. Es wird hier aber ein System angeboten und das wollte ich testen.
Und da fiel mir dann ein, dass ich ja erstmal fokussieren muss und ja noch nicht mal weiss ob der Imagetrain überhaupt gut passt. UND dann fiel mir noch ein dass ich vielleicht erstmal die Kollimation überprüfen sollte. Also erstmal den Laser holen. Ich hab meinen Laser zum kollimieren sehr genau kalibriert und das hatte bisher eigentlich immer ausreichend gut funktioniert. Also Kollimation überprüft und die war eigentlich immer noch brauchbar. Ich musste nur minimal justieren. alles gut. Dann wider die Cam rein und mal ein erstes Testbild, mittlerweile wars dunkel. Ich freute mich gleich am ersten Bild ein paar Sternenscheibchen zu sehen, das machte mir das manuelle vorfokussieren gleich recht einfach und nach 2-3 Bildern dann endlich wieder Sterne am Display :-)

Die ersten Sterne seit langer Zeit
Hab dann gleich den AF von KStars getestet, obwohl ich dazu keinerlei einstellungen gemacht hatte. Das hatte auch gleich funktioniert, also der Motorfokus und die Kamera haben einwandfrei kommuniziert. Das Saystem kam aber zu keiner Lösung, da da noch Einstellungen notwendig sind/waren. Also anhand der HFR Raten mal manuell fokussiert und mich dann dem Fokus der Guidecam gewidmet. Das war dann auch schnell erledigt, da der OAG von QHY über eine eigene Fokussierhilfe verfügt und sehr fein eingestellt werden kann.
Das ging ja schnell jetzt. Also konnte ich auch noch versuchen einzunorden. Ich hab also erstmal in der Home bzw. Parkposition Polaris ins Bild gebracht, indem ich das Stativ, das praktischerweise ja rollen hat, auf eben diesen drehte. Dann hab ich das Stativ mit den Schraubfüßen von den Rollen gehoben und ins Wasser gebracht. Jetzt nochmal per Höhenverstellung und den beiden seitlichen Schrauben Polaris halbwegs eingestellt, und dann die Routine zum einnorden in KStars gestartet. Hier wird nun der jeweilige Fehler in RA und DEC angezeigt, mit praktischen Pfeilen damit man gleich sieht in welche Richtung die Reise gehen soll.

KStars Polar Alignment
Hab das dann mal “recht genau” gemacht und dann gleich erste “Anfahrtests” gestartet, um gleich mal zu sehen, wieviel Konfiguration und Downloads das Platesolving brauchen wird um zu funktionieren. Und wieder eine sehr positive Überaschung. Im Stellarmate Image sind wohl auch bereits alle nötigen Kataloge integriert, denn nach einem ersten Test mit Procyon war nach nur einer (!) Korrektur der gesuchte Stern perfekt mittig.

Erster Platesolve Test erfolgreich
Nach 2-3 weiteren Versuchen drückte ich dann mal auf Park. Das verursachte mir einen kurzen Schock da ich schnell gesehen hatte, dass die Montierung jetzt klar auf Kollisionskurs mit dem Stativ ging. Ein schneller Sprung Richtung Kupplung rettete die Situation. Ich muss mich wohl erstmal mit Home und Parkpositionen befassen. Nun gut. Also nochmal am Himmel nach Irgendwohin fahren. M3 bot sich da grade an.

Messier 3
Und dann dacht ich wenns so gut läuft, warum nicht gleich mal das Guiding testen. Und nach ein paar kleinen Einstellungen an der Aggression war das auch sofort unter 1, das heisst bei etwa 0,76 RMS. Unglaublich, das hatte ich jetzt echt nicht erwartet. Das lässt mit genauem Einnorden und ebenfalls genaueren Einstellungen bei Guiding und Fokus auf echt gute Werte hoffen. Ich bin sehr zufrieden, zumal das mir ja auch sagt, dass die gebrauchte Montierung doch ein guter Kauf gewesen zu sein scheint. So kanns weitergehen.

Teleskopsystem bei der Arbeit